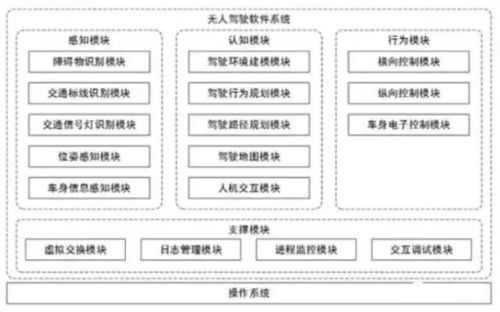
自動駕駛技術正以前所未有的速度重塑全球交通格局,其核心驅動力正是人工智能的飛速發(fā)展。從感知環(huán)境到規(guī)劃決策,再到精準控制,人工智能已經(jīng)深度嵌入自動駕駛的每一個關鍵環(huán)節(jié)。而這一切的基石,則是強大、穩(wěn)定、高效的人工智能基礎軟件開發(fā)。它不僅為自動駕駛系統(tǒng)提供了“大腦”和“神經(jīng)”,更決定了整個系統(tǒng)的性能邊界與安全上限。
人工智能在自動駕駛中的應用,首先體現(xiàn)在環(huán)境感知層面。通過深度學習算法,特別是卷積神經(jīng)網(wǎng)絡,自動駕駛系統(tǒng)能夠實時處理來自攝像頭、激光雷達、毫米波雷達和超聲波傳感器的海量多模態(tài)數(shù)據(jù)。這些算法軟件能夠精確識別道路、車道線、交通標志、行人、車輛以及其他障礙物,并估算其距離、速度與運動軌跡。例如,目標檢測模型如YOLO、SSD,以及語義分割模型,構成了感知軟件的核心組件,它們將原始傳感器數(shù)據(jù)轉化為機器可理解的、結構化的環(huán)境模型。
在感知的基礎上,決策規(guī)劃是人工智能展現(xiàn)其“智能”的關鍵。這依賴于強化學習、模仿學習以及復雜的預測與博弈算法。規(guī)劃軟件需要模擬人類駕駛員的決策過程,在瞬息萬變的交通環(huán)境中,實時規(guī)劃出安全、舒適、高效的行駛路徑。它不僅要遵守交通規(guī)則,還要能夠預測其他交通參與者的行為意圖,并做出合理的交互決策,如變道、超車、路口通行等。這一層的軟件開發(fā),直接關系到自動駕駛的“類人”駕駛風格與安全性。
所有這些高級功能的實現(xiàn),都離不開底層人工智能基礎軟件的堅實支撐。這主要包括幾個核心領域:
- 深度學習框架與工具鏈:如TensorFlow、PyTorch、PaddlePaddle等,為算法研發(fā)人員提供了構建、訓練和優(yōu)化神經(jīng)網(wǎng)絡的平臺。自動駕駛公司需要在此基礎上,開發(fā)定制化的訓練框架、數(shù)據(jù)流水線以及模型壓縮與加速工具,以應對車載嵌入式平臺算力與功耗的嚴格限制。
- 高性能計算與推理引擎:將訓練好的復雜模型高效部署到車端的計算單元(如GPU、FPGA或專用AI芯片)上,是巨大的挑戰(zhàn)。這需要開發(fā)高度優(yōu)化的推理引擎,利用算子融合、量化、剪枝等技術,在保證精度的前提下,極大提升模型的運行速度,滿足實時性要求。
- 仿真與測試平臺:自動駕駛系統(tǒng)的訓練與驗證無法完全依賴真實路測。因此,開發(fā)高保真的虛擬仿真環(huán)境軟件至關重要。這些平臺能夠模擬各種極端、罕見(corner case)的交通場景,生成海量的合成數(shù)據(jù),用于算法的迭代訓練與安全性驗證,大大加速開發(fā)周期并降低成本。
- 數(shù)據(jù)管理與標注系統(tǒng):自動駕駛是數(shù)據(jù)驅動的技術。基礎軟件需要包含強大的數(shù)據(jù)采集、存儲、管理以及高效(通常是半自動或自動)標注工具鏈,以處理PB級別的道路數(shù)據(jù),為模型持續(xù)提供高質量的“燃料”。
- 安全與可靠性中間件:這是連接AI算法與車輛硬件的“神經(jīng)系統(tǒng)”。它需要確保不同軟件模塊間通信的實時性、確定性,并提供功能安全(如ISO 26262標準)保障,確保即使在部分模塊失效時,系統(tǒng)也能進入安全狀態(tài)。
當前,人工智能基礎軟件的開發(fā)正朝著更高效、更開放、更安全的方向演進。端到端自動駕駛模型、神經(jīng)輻射場(NeRF)等新技術,對軟件棧提出了更高要求。開源協(xié)作與行業(yè)標準(如AUTOSAR Adaptive)的推進,也正在塑造著未來的開發(fā)范式。
人工智能是自動駕駛的靈魂,而基礎軟件開發(fā)則是構筑這個靈魂的骨架與血脈。它的每一次進步,都直接推動著自動駕駛汽車從實驗室駛向更廣闊的現(xiàn)實道路。隨著軟件定義汽車時代的全面到來,人工智能基礎軟件的創(chuàng)新與成熟,必將成為決定自動駕駛產(chǎn)業(yè)競爭格局的核心勝負手。